การจะทำหุ่นยนต์บังคับมือได้นั้น คงตลกถ้าไม่มีรีโมทคอนโทรล ซึ่งรีโมทคอนโทรล นั้นแบ่งได้เป็น
1.แบบมีสาย คือการควบคุมด้วยสายไฟ ธรรมดา ข้อดีคือทำง่าย ราคาถูก ตรวจสอบความผิดพลาดได้ง่าย เทคโนโลยีไม่สูง ข้อเสียคือสายพันกันยุ่ง และควบคุมได้ไม่ไกลมาก เหทาะกับหุ่นยนต์ที่ทำงานใกล้ ๆ
2.แบบไร้สาย คือการควบคุมผ่่านสัญาณคลื่นแม่เหล็กไฟฟ้า เช่นวิทยุเป็นต้น ข้อดีคือ ไม่มีสายเกะกะวุ่นวาย ควบคุมได้ไกลมาก ข้อเสียคือราคาค่อนข้างแพง ตรวจสอบยาก เทคโนโลยีระดับสูงต้องซื้อมาใช้เกือบทั้งหมด เหมาะกับหุ่นยนต์ที่ทำงานไกล ๆ เช่น หุ่นยนต์สำรวจ มุดท่อ หรือ หุ่นยนต์บิน( drone )
วันหลังจะแนะนำการเอารถของเล่นมาทำเป็นหุ่นยนต์แบบไร้สาย 5 ช่องสัญญาณ
และจากประสบการณ์รีโมทแบบไร้สายมักสั่งงานสั่งไม่ได้ดังใจ เพราะมีเวลา delay ของสัญญาณอยู่่ ทำให้ช้าไปเล็กน้อย
รีโมทแบบ มีสาย
วงจรรีโมทคอนโครล ก็คือวงจรหมุนกลับทางมอเตอร์นั่นเอง ซึ่งมีรูแบบการทำได้หลากหลายแบบมาก เช่น ใช้สวิตซ์ธรรมดา ใช้ทรานซิสเตอร์ ใช้เฟต ใช้ไอซี ใช้รีเลย์ และใช้ไมโครสวิตซ์ แต่ละอย่างมีข้อดีข้อเสียต่างกัน วิเคระห์ให้ดูดังนี้ครับ
1.แบบใช้สวิตซ์ กด ธรรมดา ทำง่าย ราคาถูก แต่รูแบบวงจร จะบังคับให้ เวลากดต้อกดสวิตซ์พร้อมกัน 2 ตัว ต่อมอเตอร์1 ตัว แปลว่า ถ้าหุ่นยนต์ใช้มอเตอร์ 2 ตัว ในการสั่งเดินหน้า ต้องกดสวิตซ์พร้อมกัน 4 ตัว ซึ่งจะวุ่นวายพอสมควร
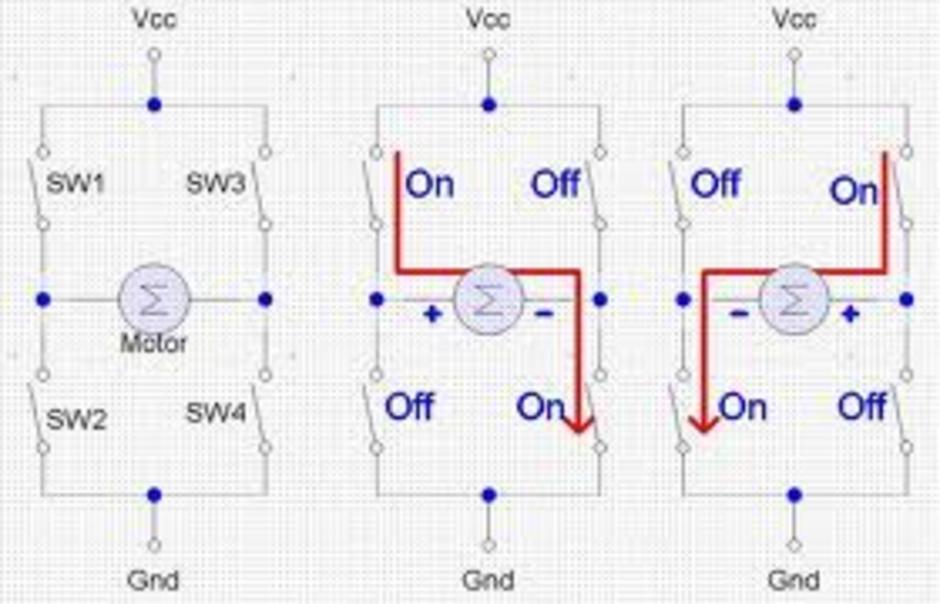
จากภาพจะเห็รนว่าถ้าจะให้มอเตอร์หมุน ต้องกดสวิตซ์ 2 ตัว คือถ้ากด sw1 พร้อมกับ sw4 กระแสไฟฟ้าจะไหลผ่านสวิตซ์ ในทิศหนึ่ง และถ้ากด sw3 พร้อทกับ sw2 กระแสไฟฟ้าก็จะไหลไปอีกทิศ มอเอตณืก็จะหมุนไปอีกทาง
2.การใช้ทรานซิสเตอร์ เฟต นั้น ทำค่อนข้างยาก ไม่เหมาะกับมือใหม่ มีข้อดีคือ แก้ไขง่าย( กว่าไอซี ) การควบคุมนุ่มนวลมาก ไม่กระชาก ไม่ขอแสดงในที่นี้
3.แบบใช้ไอซี จะง่ายมาก แนะนำไอซีชื่อ TA 7279 P หรือ TA 7279AP ของ โตซิบา รุ่น AP มาจากคำว่าadvance จึงนำกระแสได้มากกว่า การนำมาประยุกต์ใช้ ดังรูปครับ
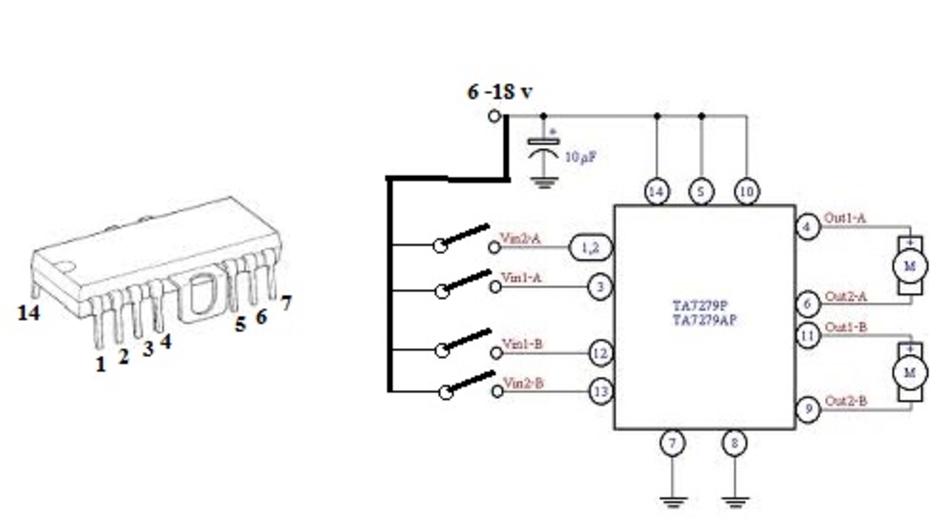
จะเห็นว่าการต่อใช้วงจรง่ายมาก เพราะไอซีคุม มอเตอร์ได้ 2 ตัว ตำแหน่งขาก็ ระบุแล้วในรูป ซึ่งมีเทคนิคการอ่านขา คือ คำแหน่งขาจะวนเป็นรูปตัวยู( U )โดยขาที่ 1 จะอยู่ทางซ้ายของรอยบาก บนตัวไอซี ถ้ามองด้านบน และหันรอยบากออกจากตัวเรา โลหะ ระหว่าง ขา 4 กับ 5 เป็นแผ่นระบายความร้อนครับ ตัวเก็บประจุ 10 ไมโครฟารัด ไม่ต้องใส่ก็ได้ครับ ยกเว้น ถ้าใช้สัญญาณวิทยุ ควบคุม ควรใส่กันสัญญาณรบกวน
ไอซีมีข้อจำกัดที่ นำกระแสได้น้อยครับ เคยทำหุ่นยนต์แข่งประเภทความเร็ว ใช้ไอซีควบคุม หุ่นยนต์ค่อนข้างช้า และถ้าเกิดเสียขึ้นมา ก็เปลี่ยนทั้งตัวไปซี เลยครับ ราคาก็ตัวละประมาณ 70 บาท เวลาไปซื้อถ้าทำหน้าฉลาดน้อยไปซื้อ อาจเจอตัวละ 150 บาท นะครับ
4.การใช้รีเลย์ ก่อนอื่นรู้จักกับรีเลย์ก่อนครับ รีเลย์เป็นสวิต์แบบควบคุม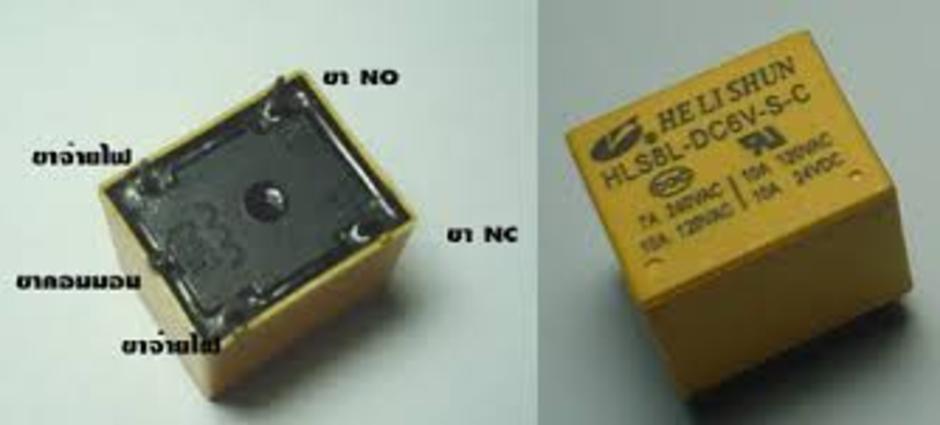
ด้วยไฟฟ้าชนิดหนึ่ง ดังรูปครับ รีเลย์มาตรฐานจะมี 5 ขา แบ่งเป็น 2 กลุ่ม
กลุ่มแรกคือ ขาNO ขา C และ ขาNC ครับ ขา c เป็นขากลาง ปกติภายในจะแตะกับขาNC ซึ่งมากจากคำว่า Normal close (ปกติปิด)จะ แต่ถ้ามีการจ่ายไฟเข้า ขา NC จะไปแตะกับ NO
กลุ่มที่ 2 มี 2 ขา จะไม่มี ชื่อกำกับ เป็นขาสำหรับจ่ายไฟเข้าครับ มักมีสัญลักษณ์รูปขดลวด ลักษณะภายในเป็นดังรูป
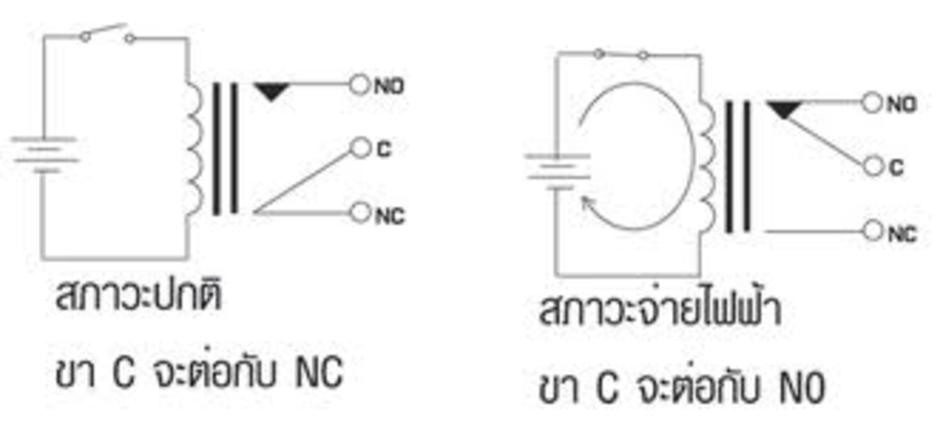
หลักการของรีเลย์ คือเมื่อเราจ่ายไฟเข้า จะทำให้ ขดลวดประฤติตนเป็นแม่เหล็กไฟฟ้า จะไปดูดขั้วC ซึ่งปกติจะแตะกับNC ให้มาแตะที่NO ถ้าหยุดจ่ายไฟ สปริงภายในจะดึง ให้ขั้ว C ให้กลับมาแตะกับ NC ดังเดิม
การใช้รีเลย์ประยุกต์เป็นวงจร ขอมาต่อคราวหน้าครับ